
Enabling Self-Driving Cars to Understand What Rules They Should Abide By
Published:
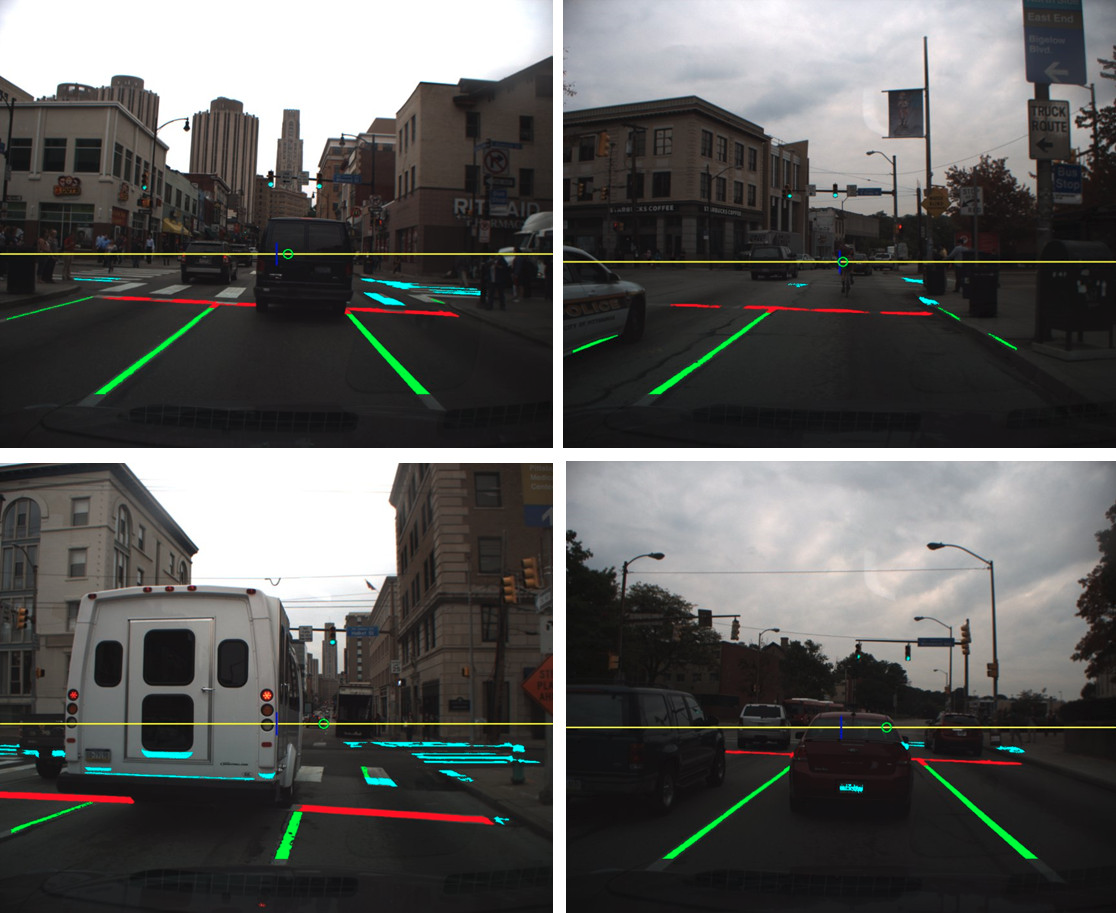
Detecting and Tracking Lateral Stoplines This work presents a computer vision algorithm that detects, by analyzing lane-marking detection results, stop- lines and tracks, using an unscented Kalman filter, the detected stop-line over time. To detect lateral and longitudinal lane- markings, our method applies a spatial filter emphasizing the intensity contrast between lane-marking pixels and their neigh- boring pixels. We then examine the detected lane-markings to identify perpendicular, geometry layouts between longitudinal and lateral lane-markings for stop-line detection. To provide re- liable stop-line recognition, we developed an unscented Kalman filter to track the detected stop-line over frames. Through the testings with real-world, busy urban street videos, our method demonstrated promising results, in terms of the accuracy of the initial detection accuracy and the reliability of the tracking. Read the following paper to learn more about this work:
- Young-Woo Seo and Ragnunathan (Raj) Rajkumar, A vision system for detecting and tracking of stop-lines, In Proceedings of the 17th IEEE International Conference on Intelligent Transportation System (ITSC-14), pp. 1970-1975, 2014.
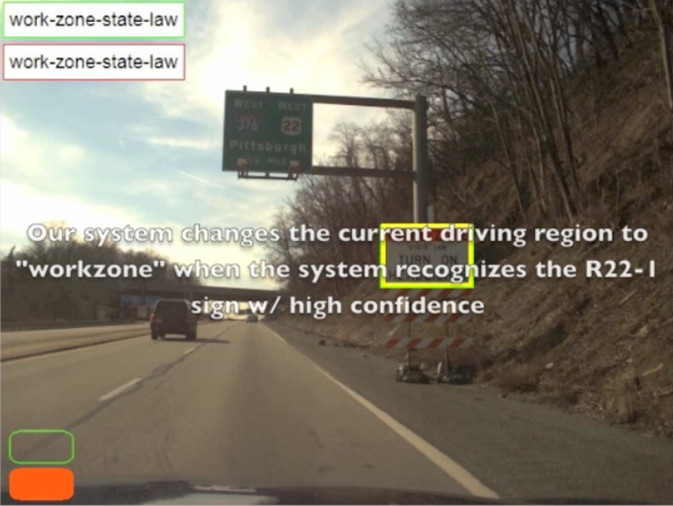
Workzone Detection for Understanding Changes of Traffic Rules and Road Geometry In order to be deployed in real-world driving environments, autonomous ground vehicles must be able to recognize and respond to exceptional road conditions, such as highway workzones, because such unusual events can alter previously known traffic rules and road geometry. In this work, we investigate a set of computer vision methods which recognize, through identification of workzone signs, the bounds of a highway workzone and temporary changes in highway driving environments. Our approach filters out irrelevant image regions, localizes potential sign image regions using a learned color model, and recognizes signs through classification. Performance of individual unit tests is promising; still, it is unrealistic to expect perfect performance in sign recognition. Performance errors with individual modules in sign recognition will cause our system to misread temporary highway changes. To handle potential recognition errors, our method utilizes the temporal redundancy of sign occurrences and their corresponding classification decisions. Through testing, using video data recorded under various weather conditions, our approach was able to reliably identify the boundaries of workzones and robustly detect a majority of driving condition changes. Read the following papers to learn more about this work:
- Young-Woo Seo, Jongho Lee, David Wettergreen, and Wende Zhang, Recognition of highway workzones for reliable autonomous driving, IEEE Transactions on Intelligent Transportation Systems, 16(2): 708-718, 2015.
- Jongho Lee, Young-Woo Seo and David Wettergreen, Kernel-based tracking for improving sign detection performance, In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS-2013), pp. 4388-4393, Nov 3-8, Tokyo, Japan, 2013.
- Jongho Lee, Young-Woo Seo, David Wettergreen, and Wende Zhang, Kernel-based traffic sign tracking to improve highway workzone recognition for reliable autonomous driving, In Proceedings of the IEEE International Conference on Intelligent Transportation Systems (ITSC-2013), pp. 1131-1136, Oct 6-9, Hague, Netherlands, 2013.
- Young-Woo Seo, David Wettergreen, and Wende Zhang, Recognizing temporary changes on highways for reliable autonomous driving, In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC-2012), pp. 3021-3026, Seoul, Korea, 2012. (the finalist of the best student paper award)